")
")
")
")
")
")
")
Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
The Shadow Runner RR100 mobile robot is a ROS-compatible outdoor mobile platform dedicated to research and higher education. Designed and manufactured in Bordeaux by our Génération Robots engineers, the Shadow Runner is an off-road and weather-resistant robot. Its great strength? It’s equipped with high-performance sensors in addition to being ROS compatible.
The RR100 is the education and research version of the GR100, a professional model with embedded localisation and navigation software designed by our own engineers.
With more than 10 years’ experience of advanced robotics in various industries (agriculture, aeronautics, nuclear, security, etc.), our Génération Robots engineers have now designed and produced their first mobile robot for research and education.
Shadow Runner RR100 is a medium-sized outdoor mobile robotics platform equipped with agricultural wheels and double Ackerman steering for handling all sorts of terrain .
We’ve equipped the RR100 robot with high-performance sensors so you can use and rapidly customise your robot for a wide variety of projects. It has no integrated navigation system, but you can install the ROS libraries of your choice. The delivered robot has embedded sensors and a PC pre-installed with Linux and ROS, in addition to the necessary motor drivers. The robot is completely open, so you can install your own ROS libraries , and its sensors and actuators are fully accessible.
We designed this robot with the aim of making it easier for users to integrate their software . We provide circuit diagrams and mechanical drawings and you can access the entire PC.
Contact our RR100 expert to talk about your project
The RR100 mobile research robot is fully ROS compatible. A compatibility that applies also to each of the components included in the robot.
The RR100 mobile platform comes with its own PC, on which the following have been pre-installed and are launched automatically at start-up:
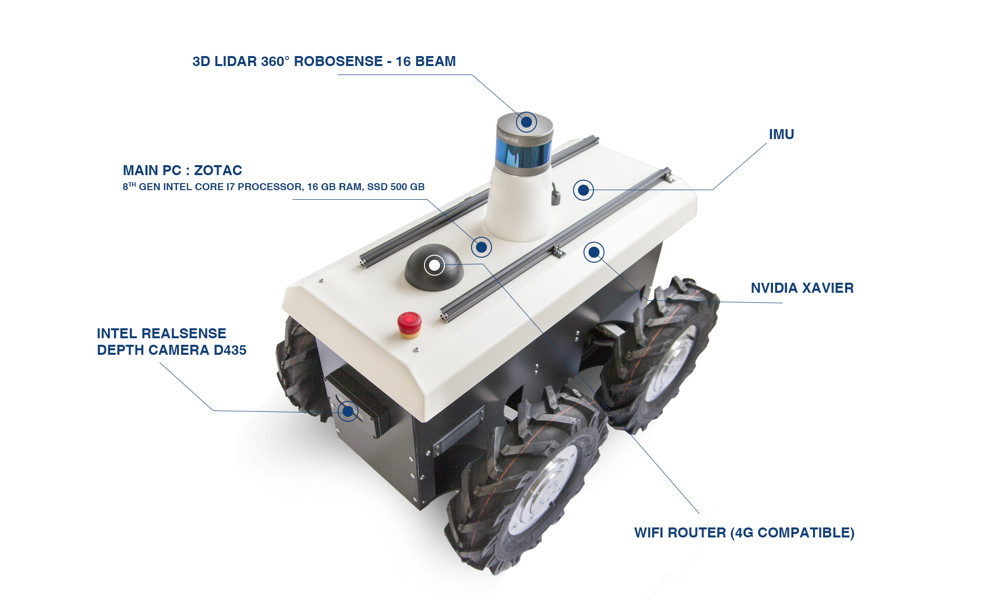
ROS nodes needed to retrieve data collected by on-board sensors ( 3D LiDAR , stereo camera, GPS and IMU )
The RR100 robot comes with ROS Noetic pre-installed by our robotics engineers. The set-up includes:
The robot comes with a USB flash drive on which you’ll find the library of ROS drivers needed to install the 3 above-mentioned features , as well as a user guide for installing and configuring these drivers.
To customise your robot and add more functionalities, we suggest you also download and install a ROS package of your choice (mapping, localisation, navigation).
You’ll find a list of the currently available open-source libraries below:
| Mapping | Localisation | Navigation | |
|---|---|---|---|
| 3D | LeGO-LOAM Cartographer HDL Graph SLAM |
HDL Localization MCL3D Cartographer |
Move Base Move Base Flex |
| 2D | Gmapping Hector SLAM |
AMCL | Move Base Move Base Flex |
Our engineers are also happy to help you choose and install your ROS drivers:
This is an optional service, so simply get in touch to check out our prices and discover the types of support we provide.
The RR100 robot is equipped with high-performance sensors, ready to collect and deliver all kinds of environmental data.
The RR100 comes with the following sensors:
The LiDAR, IMU, camera and GPS are all ROS compatible and have been pre-installed by our engineers, so they’re ready to go! You’ll also find all the necessary drivers and ROS nodes on the USB flash drive delivered with the robot.
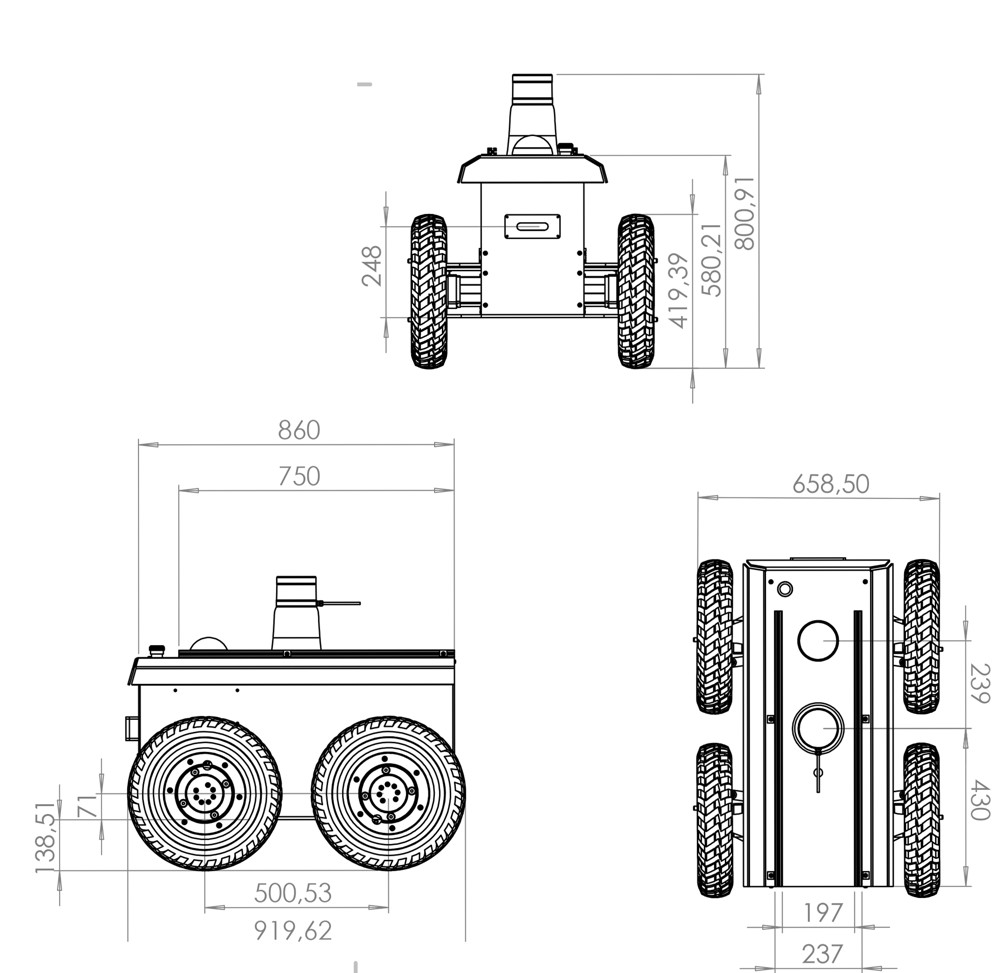
Despite its size, the RR100 mobile robot can move easily around in confined spaces thanks to its double Ackerman steering, which gives a turning radius of 50 cm.
Its various on-board sensors deliver precise location data.
And its navigational autonomy is further increased by a strong battery life (5 hours) coupled with particularly quick charging (1 hour 20).
One of the strong features of the RR100 mobile platform is its double Ackerman steering, which greatly reduces tyre wear, consumes less energy and gives the robot a turning radius of 50 cm.
This allows the RR100 to move around in tight spaces and tackle rough terrain more easily.
We’ve chosen 2 Dunkermotoren BG 75X50 motors with integrated brakes to ensure an efficient emergency stop and to use the robot in parking mode. And because there’s no need to power the brakes, the robot can for example remain stationary on a slope without moving.
Another specific feature of the RR100 robot is the presence of a back-up battery . In addition to a lithium battery, the robot carries two lead-acid batteries that can take over during a hot-swap. The user then has five minutes to replace the flat lithium battery with a charged one.
This system offers three advantages:
We’ve provided enough space inside the robot chassis to add numerous additional components. And there are 4 USB ports and 4 Ethernet ports for connections.
In addition, you can install sensors and actuators on the robot’s structure, which has a payload of 100 kg (with 5 motors - optionnal) .
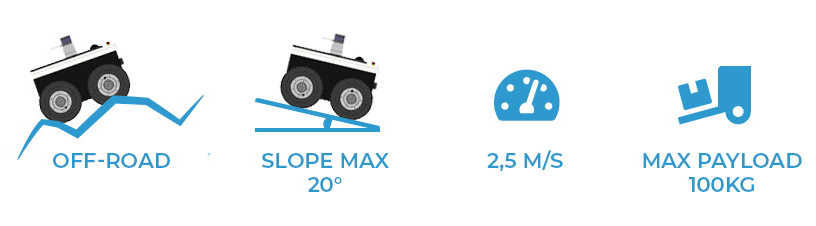
The RR100 is extremely robust , designed to be outdoors in all weathers (IP54) . It moves with a decent velocity of 2.5 m/s and weigs 90 kg. It can climb 19° slopes and overcome obstacles up to 13 cm high .
We’ve equipped it with agricultural wheels capable of tackling all types of difficult terrain (mud, bumps and holes, slopes, etc.). If requested, we can also provide smooth wheels for urban environments or indoor use.
The robot is built on an off-road, double-wishbone, long-travel, 4-wheel drive chassis with double Ackerman steering . It is not fitted with a suspension system.
The robot has a 3D laser range finder, enabling it to locate specific points in 3 dimensions and take specific measurements (e.g. by pointing a thermal camera). In this industrial context, the robot can for example collect technical information on a facility (e.g. in the field of energy) to create a model of the production site. Automatic inspection can then be used to carry out preventive maintenance operations.
These robots are also frequently used for building perimeter security. You could therefore use your RR100 robot to carry out automatic patrols around buildings for the purpose of surveillance. Equipped with the right sensors, the robot can locate people and vehicles in a given place and issue an alert if an intruder is spotted.
")
The Shadow Runner RR100 mobile robot is a ROS-compatible outdoor mobile platform dedicated to research and higher education. Designed and manufactured in Bordeaux by our Génération Robots engineers, the Shadow Runner is an off-road and weather-resistant robot. Its great strength? It’s equipped with high-performance sensors in addition to being ROS compatible.
The RR100 is the education and research version of the GR100, a professional model with embedded localisation and navigation software designed by our own engineers.


















